

বৈদ্যুতিক মটৰ সকলোতে আছে! আপোনাৰ ঘৰত, আপুনি আপোনাৰ চাৰিওফালে দেখা প্ৰায় প্ৰতিটো যান্ত্ৰিক চলাচল AC (Alternating Current) বা DC (Direct Current) বৈদ্যুতিক মটৰৰ ফলত হয়।
Table of Contents
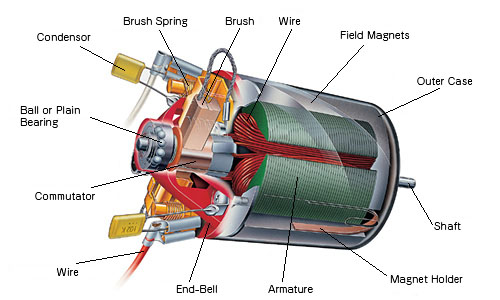
মটৰ এটাৰ প্ৰধান অংশ
এটা সৰল মটৰৰ ছয়টা অংশ থাকে:
১) এক্সেল (Axle)
২) আৰ্মেচাৰ বা ৰটৰ (Armature or rotor)
৩) কমিউটেটৰ (Commutator)
৪) ব্ৰাছসমূহ (Brushes)
৫) ক্ষেত্ৰ চুম্বক (Field magnet)
৬) কোনো ধৰণৰ ডিচি শক্তি যোগান (DC supply)
মটৰে কেনেদৰে কাম কৰে সেয়া বুজি আপুনি সাধাৰণতে চুম্বক, বৈদ্যুতিক চুম্বক আৰু বিদ্যুতৰ বিষয়ে বহুতো কথা শিকিব পাৰে।
বৈদ্যুতিক মটৰ আৰু চুম্বক
বৈদ্যুতিক মটৰ হৈছে চুম্বক আৰু চুম্বকত্বৰ বিষয়ে: মটৰে গতি সৃষ্টি কৰিবলৈ চুম্বক ব্যৱহাৰ কৰে। যদি আপুনি কেতিয়াবা চুম্বকৰ সৈতে খেলিছে আপুনি সকলো চুম্বকৰ মৌলিক সূত্ৰৰ বিষয়ে জানে: বিপৰীতবোৰে আকৰ্ষণ কৰে আৰু একেবোৰে বিকৰ্ষণ কৰে । গতিকে যদি আপোনাৰ দুটা দণ্ড চুম্বক থাকে যাৰ মুৰবোৰ “উত্তৰ” আৰু “দক্ষিণ” বুলি চিহ্নিত কৰা হয়, তেনেহ’লে এটা চুম্বকৰ উত্তৰ প্ৰান্তে আনটোৰ দক্ষিণ প্ৰান্তক আকৰ্ষিত কৰিব। আনহাতে, এটা চুম্বকৰ উত্তৰ প্ৰান্তে আনটোৰ উত্তৰ প্ৰান্তক বিকৰ্ষিত কৰিব (আৰু একেদৰে, দক্ষিণে দক্ষিণক বিকৰ্ষিত কৰিব)। বৈদ্যুতিক মটৰৰ ভিতৰত, এই আকৰ্ষণকাৰী আৰু বিকৰ্ষণকাৰী শক্তিবোৰে ঘূৰ্ণনশীল গতি সৃষ্টি কৰে।
আপুনি মটৰত দুটা চুম্বক দেখিব পাৰে: আৰ্মেচাৰ (বা ৰটৰ) হৈছে এক বৈদ্যুতিক চুম্বক, আনহাতে ক্ষেত্ৰ চুম্বক হৈছে এক স্থায়ী চুম্বক (ক্ষেত্ৰ চুম্বক এটা ইলেক্ট্ৰমেগনেটও হ’ব পাৰে, কিন্তু বেছিভাগ সৰু মটৰত ই শক্তি সঞ্চয় কৰাৰ বাবে ব্যৱহাৰ নহয়)।
মটৰৰ অংশবোৰৰ কাম:
এক্সেলে আৰ্মেচাৰ আৰু কমিউটেটৰক ধৰি ৰাখে। আৰ্মেচাৰ হৈছে বৈদ্যুতিক চুম্বকৰ এক সংহতি। মটৰত থকা আৰ্মেচাৰ হৈছে পাতল ধাতুৰ প্লেটৰ এক সংহতি যাক একেলগে থোৱা থাকে, যাৰ সৈতে পাতল তামৰ তাঁৰ বোৰ আৰ্মেচাৰৰ তিনিটা মেৰুৰ চাৰিওফালে কুণ্ডলী বদ্ধ হৈ থাকে। প্ৰতিটো তাঁৰৰ দুটা মুৰ (প্ৰতিটো মেৰুৰ বাবে এটা তাঁৰ) টাৰ্মিনেল এটাত চ’ল্ডাৰ কৰা হয়, আৰু তাৰ পিছত তিনিটা টাৰ্মিনেলৰ প্ৰতিটো কমিউটেটৰৰ এটা প্লেটৰ সৈতে তাঁৰযুক্ত কৰা হয়।
আৰ্মেচাৰৰ এটা এক্সেল থাকে, আৰু এক্সেলৰ সৈতে কমিউটেটৰ সংলগ্ন থাকে। কমিউটেটৰ হৈছে এক্সেলৰ সৈতে সংলগ্ন এযোৰ প্লেট। এই প্লেটবোৰে ইলেক্ট্ৰমেগনেটৰ কুণ্ডলীৰ বাবে দুটা সংযোগ প্ৰদান কৰে।
বৈদ্যুতিক মটৰৰ “বৈদ্যুতিক ক্ষেত্ৰ ফ্লিপ কৰা” অংশটো দুটা অংশৰ দ্বাৰা সম্পূৰ্ণ হয়: কমিউটেটৰ আৰু ব্ৰাছ।
ইলেক্ট্ৰমেগনেটলৈ বিদ্যুত প্ৰবাহিত হ’বলৈ কমিউটেটৰ আৰু ব্ৰাছে একেলগে কাম কৰে, আৰু লগতে ইলেক্ট্ৰনবোৰ সঠিক মুহূৰ্তত প্ৰবাহিত হোৱা দিশটো ওলোটাই দিয়ে। কমিউটেটৰৰ সম্পৰ্কবোৰ ইলেক্ট্ৰমেগনেটৰ এক্সেলৰ সৈতে সংলগ্ন থাকে, সেয়েহে সেইবোৰ চুম্বকৰ সৈতে ঘূৰে। ব্ৰাছবোৰ হৈছে মাত্ৰ দুটা স্প্ৰিং ধাতু বা কাৰ্বনৰ টুকুৰা যিয়ে কমিউটেটৰৰ সম্পৰ্কৰ সৈতে সম্পৰ্ক স্থাপন কৰে।
যিকোনো AC বৈদ্যুতিক মটৰৰ অন্তিম টুকুৰা হৈছে ক্ষেত্ৰ চুম্বক। মটৰৰ ক্ষেত্ৰ চুম্বকটো কেনৰ দ্বাৰা নিজেই গঠন হয় আৰু দুটা বক্ৰ স্থায়ী চুম্বক।
প্ৰতিটো চুম্বকৰ এটা মুৰ কেনত কটা স্লটএটাৰ ওপৰত থাকে, আৰু তাৰ পিছত ৰিটেইনিং ক্লিপটো দুয়োটা চুম্বকৰ আনটো মূৰৰ বিপৰীতে হেঁচি দিয়ে।
বৈদ্যুতিক চুম্বক আৰু মটৰ
বৈদ্যুতিক মটৰে কেনেদৰে কাম কৰে বুজি পোৱাৰ চাবিটো হ’ল ইলেক্ট্ৰমেগনেটে কেনেদৰে কাম কৰে বুজি পোৱা।
বৈদ্যুতিক মটৰৰ আধাৰ হৈছে ইলেক্ট্ৰমেগনেট। আপুনি নিম্নলিখিত পৰিস্থিতিটো কল্পনা কৰি মটৰত কেনেদৰে কাম কৰে বুজিব পাৰে। ধৰি লওক যে আপুনি এটা নখৰ চাৰিওফালে তাঁৰৰ 100 টা লুপ মেৰিয়াই আৰু ইয়াক বেটাৰীৰ সৈতে সংযোগ কৰি এটা সৰল বৈদ্যুতিক চুম্বক সৃষ্টি কৰিছে। বেটাৰি সংযোজিত হৈ থাকোতে নখটো চুম্বক হৈ পৰিব আৰু উত্তৰ আৰু দক্ষিণ মেৰু থাকিব।
এতিয়া ধৰি লওক যে আপুনি আপোনাৰ নখটো ইলেক্ট্ৰমেগনেট, ইয়াৰ মাজভাগৰ মাজেৰে এক্সেল এটা চলায় আৰু ইয়াক ঘোঁৰাৰ খোজৰ আকৃতিৰ চুম্বকৰ মাজত স্থগিত ৰাখক। যদি আপুনি ইলেক্ট্ৰমেগনেটৰ সৈতে বেটাৰী এটা সংলগ্ন কৰে যাতে নখৰ উত্তৰ প্ৰান্তটো দেখুওৱাৰ দৰে দেখা যায়, চুম্বকত্বৰ মৌলিক সূত্ৰই আপোনাক কয় কি হ’ব: ইলেক্ট্ৰমেগনেটৰ উত্তৰ প্ৰান্তটো ঘোঁৰাৰ খোজৰ আকৃতিৰ চুম্বকৰ উত্তৰ প্ৰান্তৰ পৰা বিকৰ্ষিত কৰা হ’ব আৰু ঘোঁৰাৰ খোজৰ আকৃতিৰ চুম্বকৰ দক্ষিণ প্ৰান্তলৈ আকৰ্ষিত কৰা হ’ব। বৈদ্যুতিক চুম্বকৰ দক্ষিণ প্ৰান্তটো একে ধৰণে প্ৰতিৰোধ কৰা হ’ব। নখটো প্ৰায় আধা ঘূৰ্ণন হ’ব আৰু তাৰ পিছত দেখুওৱা স্থিতিত ৰ’ব।
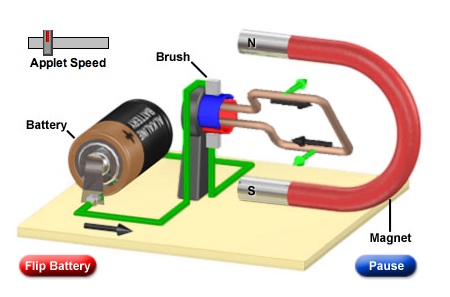
আপুনি দেখিব পাৰে যে গতিৰ এই অৰ্ধ-ঘূৰ্ণনটো কেৱল চুম্বকে প্ৰাকৃতিকভাৱে ইটোৱে সিটোক আকৰ্ষিত আৰু বিকৰ্ষিত কৰাৰ বাবে হয়। বৈদ্যুতিক মটৰৰ চাবিকাঠি হৈছে তাৰ পিছত এখোজ আগুৱাই যোৱা যাতে, এই মুহূৰ্তত গতিৰ এই আধা-ঘূৰ্ণন সম্পূৰ্ণ হোৱাৰ সময়ত, ইলেক্ট্ৰমেগনেটৰ ক্ষেত্ৰখন ওলোটা হয়। ফ্লিপটোৰ ফলত ইলেক্ট্ৰমেগনেটে গতিৰ আন এটা আধা-ঘূৰ্ণন সম্পূৰ্ণ কৰে। আপুনি কেৱল তাঁৰত প্ৰবাহিত ইলেক্ট্ৰনৰ দিশ সলনি কৰি চুম্বকীয় ক্ষেত্ৰটো ওলোটাই দিব (আপুনি বেটাৰিটো ওলোটাই এনে কৰে)। যদি গতিৰ প্ৰতিটো আধা-ঘূৰ্ণনৰ শেষত ইলেক্ট্ৰমেগনেটৰ ক্ষেত্ৰখন সঠিক মুহূৰ্তত ওলোটাই দিয়া হয়, বৈদ্যুতিক মটৰটো মুক্তভাৱে ঘূৰিব।
যেতিয়া আপুনি এই সকলোবোৰ অংশ একেলগে ৰাখিব, এটা সম্পূৰ্ণ বৈদ্যুতিক মটৰ নিৰ্মাণ হ’ব।


লক্ষ্য কৰিব লগা গুৰুত্বপূৰ্ণ কথাটো হ’ল যে আৰ্মেচাৰ পথালি স্থিতিৰ মাজেৰে পাৰ হৈ যোৱাৰ লগে লগে, ইলেক্ট্ৰমেগনেটৰ মেৰুবোৰ ওলোটা হয়। ফ্লিপৰ বাবে, ইলেক্ট্ৰমেগনেটৰ উত্তৰ মেৰু সদায় এক্সেলৰ ওপৰত থাকে যাতে ই ক্ষেত্ৰ চুম্বকৰ উত্তৰ মেৰুক বিকৰ্ষিত কৰিব পাৰে আৰু ক্ষেত্ৰ চুম্বকৰ দক্ষিণ মেৰু আকৰ্ষণ কৰিব পাৰে।
যদি আপুনি কেতিয়াবা এটা সৰু বৈদ্যুতিক মটৰ পৃথক কৰাৰ সুযোগ পায়, আপুনি দেখিব যে ইয়াত ওপৰত বৰ্ণনা কৰা সকলোবোৰ থাকে: দুটা সৰু স্থায়ী চুম্বক, এটা কমিউটেটৰ, দুটা ব্ৰাছ, আৰু ধাতুৰ টুকুৰা এটাৰ চাৰিওফালে ঘূৰণীয়া তাঁৰৰ দ্বাৰা তৈয়াৰ কৰা এটা বৈদ্যুতিক চুম্বক। অৱশ্যে, প্ৰায়বোৰ মটৰতে দুটা মেৰুৰ সলনি তিনিটা মেৰু থাকে। মটৰ এটাৰ তিনিটা মেৰু থকাৰ দুটা ভাল কাৰণ আছে:
(১) ইয়াৰ ফলত মটৰৰ গতিশীলতা উন্নত হয়। দুটা মেৰুৰ মটৰত, যদি ইলেক্ট্ৰমেগনেট সন্তুলন বিন্দুত থাকে, মটৰ আৰম্ভ হ’লে ক্ষেত্ৰ চুম্বকৰ দুটা মেৰুৰ মাজত সম্পূৰ্ণ পথালি হয়, যাৰ বাবে তাত আৰ্মেচাৰটো লাগি ধৰে। সেয়া তিনি-মেৰু মটৰত কেতিয়াও নহয়।
(২) যেতিয়াই কমিউটেটৰে ফিল্ডটো দুটা মেৰুৰ মটৰত ফ্লিপ কৰা স্থানত আঘাত কৰে, কমিউটেটৰে বেটাৰীটো (ধনাত্মক আৰু ঋণাত্মক টাৰ্মিনেলবোৰ পোনপটীয়াকৈ সংযোগ হৈ থকা) এক মুহূৰ্তৰ বাবে শ্বৰ্টআউট কৰে। এই শ্বৰ্টিংয়ে শক্তি অপচয় কৰে আৰু বেটাৰিটো অপ্ৰয়োজনীয়ভাৱে নিষ্কাশন কৰে। তিনি-মেৰুৰ মটৰে এই সমস্যাটো সমাধান কৰে।
বৈদ্যুতিক মটৰবোৰে গতি সৃষ্টি কৰিবলৈ বৈদ্যুতিক শক্তিক যান্ত্ৰিক শক্তিলৈ ৰূপান্তৰ কৰে। চুম্বকীয় ক্ষেত্ৰ আৰু ঘূৰ্ণায়মান পৰিৱৰ্তন (AC) বা ডাইৰেক্ট (DC) বিদ্যুতৰ মাজৰ আন্তঃক্ৰিয়াৰ জৰিয়তে মটৰৰ ভিতৰত বল সৃষ্টি হয়। বিদ্যুতৰ শক্তি বৃদ্ধি হোৱাৰ লগে লগে চুম্বকীয় ক্ষেত্ৰৰ শক্তিও বৃদ্ধি পায়। ওমৰ সূত্ৰ (V=IR) অনুসৰি, প্ৰতিৰোধ বৃদ্ধি হোৱাৰ লগে লগে একে বিদ্যুৎ বজাই ৰাখিবলৈ ভল্টেজ বৃদ্ধি হ’ব লাগিব।
বৈদ্যুতিক মটৰৰ বিভিন্ন ব্যৱহাৰ আছে। পৰম্পৰাগত ঔদ্যোগিক ব্যৱহাৰৰ ভিতৰত আছে ব্ল’ৱাৰ, যন্ত্ৰ আৰু শক্তি সঁজুলি, ফেন আৰু পাম্প। Hobbyist সকলে সাধাৰণতে সৰু প্ৰয়োগত মটৰ ব্যৱহাৰ কৰে যাৰ বাবে চলাচলৰ প্ৰয়োজন হয় যেনে ।
মটৰৰ প্ৰকাৰ:
বহুপ্ৰকাৰৰ DC মটৰ আছে, কিন্তু আটাইতকৈ সচৰাচৰ ব্যৱহাৰ হয় ব্ৰাছ বা ব্ৰাছহীন। লগতে কম্পনশীল মটৰ, ষ্টেপাৰ মটৰ, আৰু চাৰ্ভো মটৰো উল্লেখযোগ্য।
DC ব্ৰাছ মটৰবোৰ আটাইতকৈ সৰল আৰু বহুতো সঁজুলি, পুতলা আৰু অটোমোবাইলত পোৱা যায়। তেওঁলোকে বিদ্যুতৰ দিশ সলনি কৰিবলৈ কমিউটেটৰৰ সৈতে সংযোগী Contact ব্ৰাছ ব্যৱহাৰ কৰে। সেইবোৰ উৎপাদন কৰিবলৈ সস্তা আৰু নিয়ন্ত্ৰণ কৰিবলৈ সৰল আৰু কম গতিত উৎকৃষ্ট torque থাকে (Revolution প্ৰতি মিনিটত বা RPMত জোখা হয়)। কেইটামান নেতিবাচক দিশ হৈছে যে worn out ব্ৰাছ সলনি কৰিবলৈ সেইবোৰৰ নিৰন্তৰ তত্বাৱধানৰ প্ৰয়োজন, ব্ৰাছ গৰম কৰাৰ ফলত গতি সীমিত থাকে, আৰু ব্ৰাছ আৰ্কিংৰ পৰা বিদ্যুতচুম্বকীয় শব্দ সৃষ্টি কৰিব পাৰে।
ব্ৰাছহীন DC মটৰবোৰে সিহঁতৰ ৰটৰ assemblyত স্থায়ী চুম্বক ব্যৱহাৰ কৰে। সিহঁতে বিমান আৰু মাটিত চলা বাহনত প্ৰয়োগৰ বাবে hobby বজাৰত জনপ্ৰিয়। সেইবোৰ অধিক কাৰ্যকৰী, কম তত্বাৱধানৰ প্ৰয়োজন, কম শব্দ সৃষ্টি কৰে, আৰু ব্ৰাছ থকা DC মটৰৰ তুলনাত শক্তিৰ ঘনত্ব অধিক হয়। সেইবোৰ বৃহৎ পৰিমাণে প্ৰস্তুত কৰিব পাৰি আৰু DC currentৰ দ্বাৰা চালিত হোৱাৰ বাহিৰে, constant RPM থকা AC মটৰৰ দৰে হ’ব পাৰে। অৱশ্যে কেইটামান অসুবিধা আছে, যাৰ ভিতৰত আছে যে সেইবোৰ এক বিশেষ নিয়ন্ত্ৰক অবিহনে নিয়ন্ত্ৰণ কৰা কঠিন আৰু drive applicationত কম starting load আৰু বিশেষ গিয়াৰবক্সৰ প্ৰয়োজন হয় যাৰ ফলত তেওঁলোকৰ মূলধন ব্যয়, জটিলতা আৰু পাৰিপাৰ্শ্বিক সীমাবদ্ধতা অধিক হয়।
কম্পন যেনে চেল ফোন বা গেম কণ্ট্ৰোলাৰৰ প্ৰয়োজন হোৱা এপ্লিকেচনৰ বাবে ভাইব্ৰেটিং মটৰ ব্যৱহাৰ কৰা হয়। এইবোৰ বৈদ্যুতিক মটৰৰ দ্বাৰা উৎপন্ন হয় আৰু drive shaftত এক অসন্তুলিত ভৰ থাকে যাৰ ফলত কম্পন হয়। সেইবোৰ এলাৰ্ম বা দুৱাৰৰ ঘণ্টাৰ বাবে কম্পন হোৱা অ-ইলেক্ট্ৰনিক কামতো ব্যৱহাৰ কৰিব পাৰি।
যেতিয়াই সঠিক অৱস্থান অন্তৰ্ভুক্ত থাকে, ষ্টেপাৰ মটৰবোৰ আপোনাৰ বন্ধু হয়। এইবোৰ প্ৰিণ্টাৰ, যন্ত্ৰ সঁজুলি, আৰু প্ৰক্ৰিয়া নিয়ন্ত্ৰণ প্ৰণালীত পোৱা যায় আৰু উচ্চ- holding torqueৰ বাবে নিৰ্মাণ কৰা হয় যি ব্যৱহাৰকাৰীক এটা খোজৰ পৰা পৰৱৰ্তী পদক্ষেপলৈ যোৱাৰ ক্ষমতা প্ৰদান কৰে। তেওঁলোকৰ এটা নিয়ন্ত্ৰক প্ৰণালী আছে যি ড্ৰাইভাৰ এজনলৈ প্ৰেৰণ কৰা চিগনেল পালছৰ জৰিয়তে অৱস্থাননিৰ্ধাৰণ কৰে, যি সেইবোৰ ব্যাখ্যা কৰে আৰু মটৰলৈ সমানুপাতিক ভল্টেজ প্ৰেৰণ কৰে। সেইবোৰ তৈয়াৰ আৰু নিয়ন্ত্ৰণ কৰিবলৈ তুলনামূলকভাৱে সৰল, কিন্তু সেইবোৰে সৰ্বাধিক বিদ্যুৎ নিৰন্তৰ ভাৱে লৈ থাকে। সৰু পদক্ষেপ দূৰত্বই শীৰ্ষ গতি সীমিত কৰে আৰু উচ্চ loadত পদক্ষেপবোৰ এৰি যাব পাৰি।
চাৰ্ভো মটৰ হৈছে আন এটা জনপ্ৰিয় hobby বজাৰ মটৰ যাক সঠিকতা অবিহনে অৱস্থান নিয়ন্ত্ৰণৰ বাবে ব্যৱহাৰ কৰা হয়। সিহঁতৰ জনপ্ৰিয় ব্যৱহাৰবোৰৰ ভিতৰত আছে ৰিম’ট কণ্ট্ৰোল application যেনে RC পুতলা বাহন আৰু ৰবটিক্স। এইবোৰত এটা মটৰ, potentiometer, আৰু এক নিয়ন্ত্ৰণ বৰ্তনী থাকে আৰু বেছিভাগ Pulse width modulation (PWM)ৰ দ্বাৰা নিয়ন্ত্ৰণ তাঁৰলৈ বৈদ্যুতিক স্পন্দন প্ৰেৰণৰ জৰিয়তে নিয়ন্ত্ৰণ কৰা হয়। চাৰ্ভোবিলাক AC বা DC হ’ব পাৰে। AC চাৰ্ভোয়ে উচ্চতৰ বিদ্যুৎ বৃদ্ধি নিয়ন্ত্ৰণ কৰিব পাৰে আৰু ঔদ্যোগিক যন্ত্ৰপাতিৰ বাবে ব্যৱহাৰ কৰা হয়, আনহাতে DC চাৰ্ভো সৰু hobbyist applicationৰ বাবে ব্যৱহাৰ কৰা হয়।
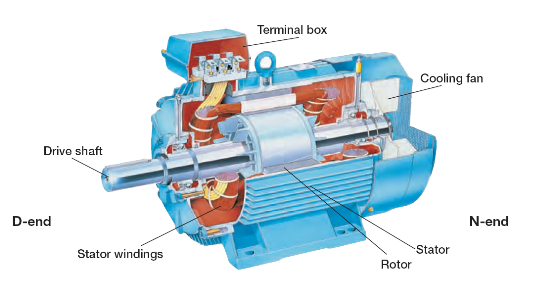
AC মটৰৰ তিনিটা মৌলিক প্ৰকাৰ আছে:
১) ইণ্ডাক্সন (Induction)
২) চিংক্ৰোনাছ (Synchronous) আৰু
৩) ঔদ্যোগিক (Industrial)
ইণ্ডাক্সন মটৰবোৰক এচিংক্ৰোনাছ মটৰ বুলি কোৱা হয়, কিয়নো সেইবোৰ একে constant হাৰত চলাচল নকৰে বা যোগান ধৰা কম্পনাঙ্কতকৈ(frequency) লেহেম হৈ নাযায়। স্লিপ, প্ৰকৃত আৰু সমকালীন গতিৰ মাজৰ পাৰ্থক্য, ইণ্ডাক্সন মটৰত টৰ্ক, ঘূৰ্ণন সৃষ্টি কৰা পাক খোৱা শক্তি প্ৰস্তুত কৰিবলৈ প্ৰয়োজন। এই মটৰবোৰৰ ৰটৰৰ চাৰিওফালে থকা চুম্বকীয় ক্ষেত্ৰটো প্ৰেৰিত বিদ্যুতৰ ফলত হয়।
AC যোগান ধৰাৰ লগে লগে চিংক্ৰোনাছ মটৰৰ ৰটৰ স্থিৰ হাৰত ঘূৰে। তেওঁলোকৰ চুম্বকীয় ক্ষেত্ৰ স্থায়ী চুম্বকৰ দ্বাৰা সৃষ্টি হয়। ঔদ্যোগিক মটৰবোৰ তিনি-পৰ্যায়ৰ, উচ্চ শক্তিপ্ৰয়োগ যেনে কনভেয়াৰ বা ব্ল’ৱাৰৰ বাবে ডিজাইন কৰা হৈছে। ঘৰুৱা সঁজুলি যেনে ঘড়ী, ফেন, আৰু ডিস্ক ড্ৰাইভতো AC মটৰ পোৱা যায়।
এনেদৰে আমাৰ চৌপাশে থকা বিভিন্ন বৈদ্যুতিক মটৰে কাম কৰে। এয়া বৈদ্যুতিক মটৰে কি দৰে কাম কৰে তাৰ এক চমু আভাস হে মাত্ৰ। উচ্চ অধ্যয়ণে আমাক আৰু অধিক জনাত সহায় কৰিব।
মটৰৰ বিষয়ে আৰু অধিক জানিবলৈ আমাৰ লগত যোগ দিয়ক